

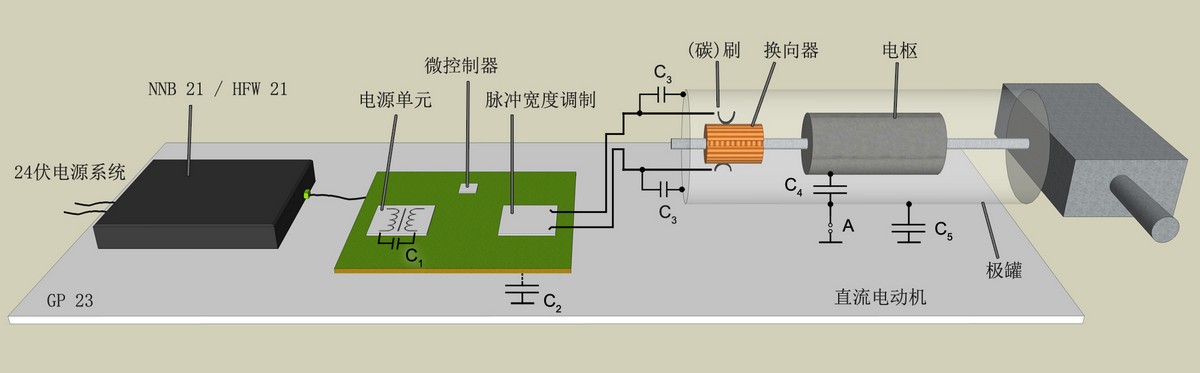
被测物由一个配备电源的测试电路板、微控制器、PWM 以及直流电动机等部分组成。
直流电动机连接在测试电路板的PWM输出端。 直流电机通常由电枢、极罐和电刷集流器等部分构成。
总共有三个显著的骚扰源:
- 电源部分 (在隔离电源的情况下, 骚扰抑制非常复杂)
- PWM 电路
- 换向器的换向过程,因为直流电机的电枢电感而产生骚扰
利用线路阻抗稳定网络,可以在测试电路板的电源输入端口测试受到的干扰。 由于上述三种骚扰源会产生叠加, 所以干扰抑制非常复杂。 一般情况下很难从频谱中识别出哪个骚扰源导致问题的出现。
除此之外,PWM 工作模式的直流电动机中还存在 PWM 信号和换向电枢电感信号之间的共振。 这种共振显著地增强了骚扰。 而对于直流电工作模式的电动机, 情况就变得相对容易。
对三个骚扰源进行单独抑制, 是非常有意义的做法。 我们最好从电源部分进行。
使用负载电阻代替直流电动机。 仅仅通过去干扰电容 C3 连接直流电动机, 使其被动地参与到实验装置中。 在这种情况下, PWM 电路是断开的。
隔离电源通过开关电源变压器产生很强的容性电流。 通过限制开关电压和回扫电压的 du / dt 可以降低这种电流, 但是大多情况下这还不够。 采用加入电容器 C1 的方法, 可以使该电流返回源端。
该措施的效果可以通过线路阻抗稳定网络 NNB21 或者射频电流转换器 HFW21 以及频谱分析仪软件 ChipScan-ESA 进行测试和记录。 利用该软件, 可以任意改变相应频谱曲线的颜色、将频谱曲线堆叠显示等操作, 从而方便快速地对其进行比较分析。
而去除 PWM 电路的骚扰通常是更复杂一些。 PWM 信号通过抑制电刷火花的电容器 C3 传导到极罐, 并从那里传输至测量接地参考表面 (GP23)。 电流经由 NNB21 流回, 在那里测量的值就是噪声电流。 从极罐到 GP 23 的路径可以通过固体接地 (A) 或经由寄生电容 C5。 PWM 工作模式下的电容器 C3 应该很小 (大约 1 nF), 以便将流出的 PWM 电流控制在一定的限度内。 这项措施通常还不够, 还必须在 PWM 和直流电机的线路中加入纵向扼流圈, 以进一步减少 PWM 的骚扰电流。
必须注意, 在 PWM 工作模式下, 不要使用已经对直流干扰有抑制效果的电机。 这样的电机可能配有 10-100 nF 的电容 C3, 它将大大增加 PWM 模式时的噪声电流。 采用电气隔离极罐, 通常只能在较低的频率范围减少骚扰电流, 因为极罐和接地之间的电容 C5 跨接了电隔离。
与以上所述相反, 为了清除电刷干扰, 电容器 C3 要求尽可能大于 1 nF。 对于 PWM 去干扰而言, 这是一个很难解决的矛盾。 这个问题可以通过上面已经提到的在 PWM 线路上串联扼流圈的办法进行缓解。
从电机中伸出的金属轴, 也会导致更高的耦合输出, 所以结构设计方面的措施, 也会起到一定的作用。 所有这些措施都可以利用线路阻抗稳定网络 NNB 21 或者射频电流转换器 HFW 21 进行测量, 并利用芯片扫描软件 ChipScan-ESA 进行分析和评估。
总体而言, 我们的任务是巧妙利用所有这些措施, 令人满意地掌握和控制这三个骚扰源。